При лазерной наплавке и лазерном восстановлении обрабатываемые объекты часто представляют собой заготовки неправильной формы или имеют неровные поверхности. Сопло для лазерной наплавки необходимо держать на постоянном расстоянии от поверхности заготовки, чтобы поддерживать стабильное качество процесса. Поэтому в практических инженерных приложениях часто требуется длительное время работы по программированию, что влияет на эффективность работы и продлевает период работы. Для системы лазерной наплавки робота это основной вариант работы по калибровке обучения тяжелого робота. Обычно обучение робота полностью зависит от ручного управления, которое требует большого опыта оператора и подвержено ошибкам, а также является узким местом в реализации высокоэффективных и высокоточных приложений лазерной наплавки и ремонта. |
Адаптивная лазерная наплавка, повторяющая форму, является эффективным способом решения вышеуказанной проблемы, который в основном включает в себя следующие три основных этапа:
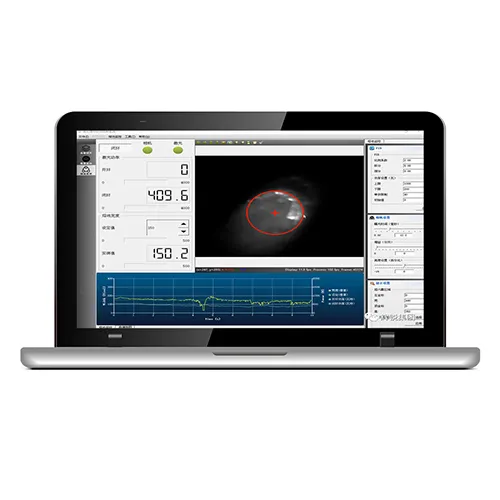
1. Онлайн-контроль с помощью датчиков: датчики могут быть контактными, машинного зрения, лазерного перемещения и т. д., при этом необходимо установить соответствие между системой координат измерения датчика и системой координат роботизированного инструмента для лазерной наплавки.
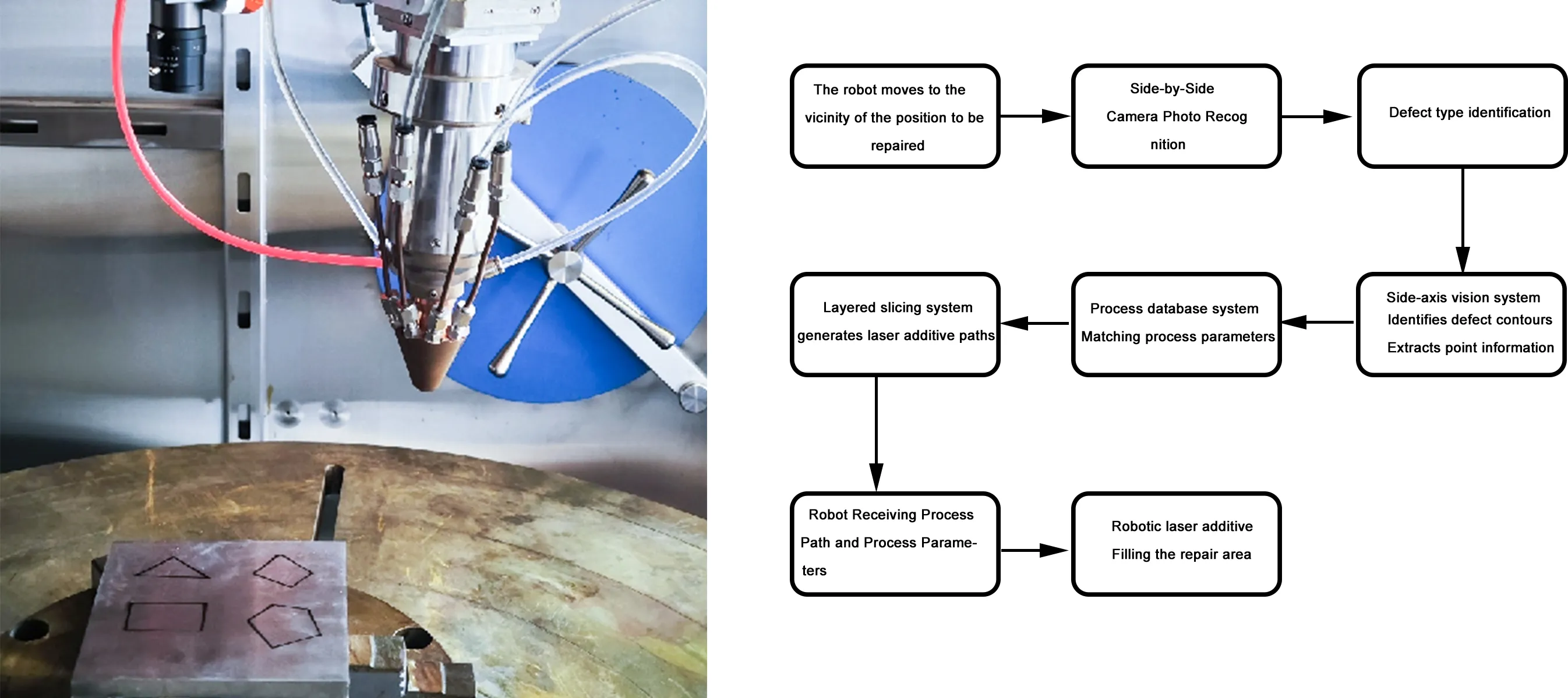
2. автоматическая обработка данных: включая фильтрацию данных, реконструкцию, моделирование и т. д. В некоторых приложениях также необходимо реализовать интеллектуальные алгоритмы, такие как автоматическое сопоставление моделей и распознавание дефектов;
3. автоматическое формирование траектории и настройка параметров процесса: на основе модели, созданной путем автоматической обработки данных, послойной срезки, формирования траектории заполнения и в зависимости от типа дефектов, автоматический выбор оптимизированных параметров процесса.
Существует три типичных сценария применения функции адаптивной лазерной наплавки, повторяющей форму:
1. радикально сократить объем ручного обучения, сократить время программирования и повысить точность калибровки;
2. автоматически устанавливать систему координат заготовки или систему координат пользователя, чтобы траекторию робота, созданную автономным программированием, можно было быстро и точно применить к заготовке для улучшения производительности; может заменить традиционный метод поиска положения характерной точки, а также решить проблему позиционирования некоторых сцен, которые невозможно обнаружить вручную;
3. имеет простую функцию трехмерного сканирования в сочетании с алгоритмами автоматической идентификации и алгоритмами формирования пути среза, что позволяет обеспечить быстрое обнаружение дефектов и адаптивный ремонт на месте; хотя общая точность измерения ниже, чем у обычной системы трехмерного измерения, но для лазерного ремонта было достаточно, а также высокая эффективность и низкая стоимость.